VisionLIDAR is a comprehensive, production Windows application designed to visualize, manage, process and analyze LiDAR point cloud data. Unlike traditional point cloud software, VisionLIDAR has a unique algorithm to extract from mobile or terrestrial point cloud , vegetation and building point cloud. The first step is to extract ground points from the point cloud and afterwards extract building points, follow by vegetation points. Our unique algorithm for bare earth extraction is automatically filtering the vegetation and building points. Our parameter setting works fine with point clouds under extreme variations in terrain. Even with steep slopes covered with dense vegetation or areas where there is very few ground points available.
VisionLiDAR Benefits
VisionLidar software suite is designed for 64-bit Windows operating systems and provides powerful point cloud software for filtering, classifying, editing and data management functions.
Version 28 highlights a completely new, redesigned interface with tools organized into intuitive ribbon groups,with over 100 new features and enhancements and benefits:
The new Registration Module Register and align scans independently from scanner software, advanced Importer: add scans from aerial, terrestrial and mobile to an existing project. And transformation calculator: Reference entire projects to a coordinate system.
Point Cloud Extract: Extract specific parts of the point cloud to classify, delete, or create surface.
Classification, filtering into 126 layers: Automatic detection of vegetation, building, and bare earth.
Profile and Section: Allow dynamic viewing of profile and section of your point cloud into any direction.
Vectorize: Vectorize plans created based on your point cloud with points, lineworks, alignment, surface directly into your CAD.
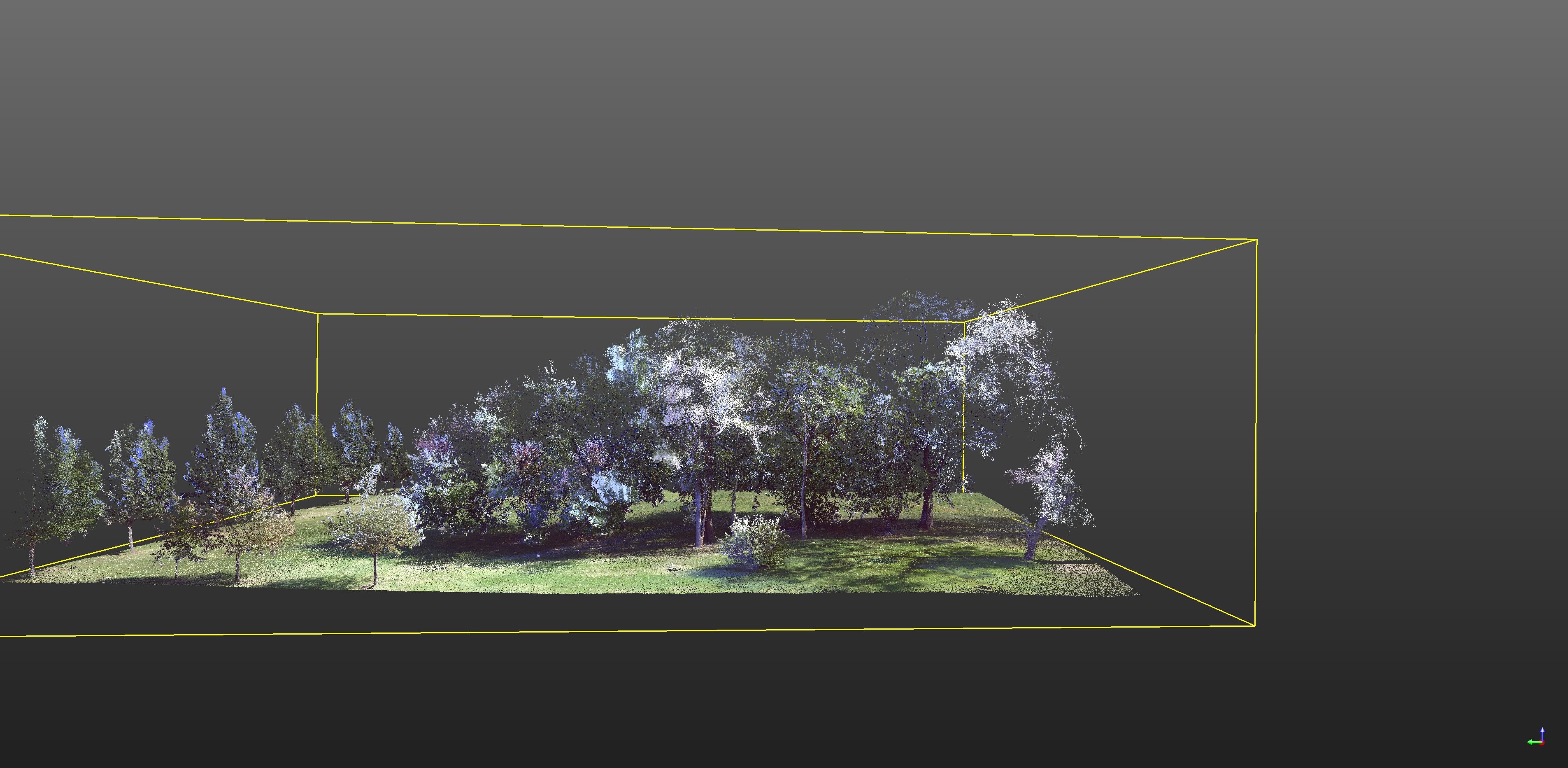
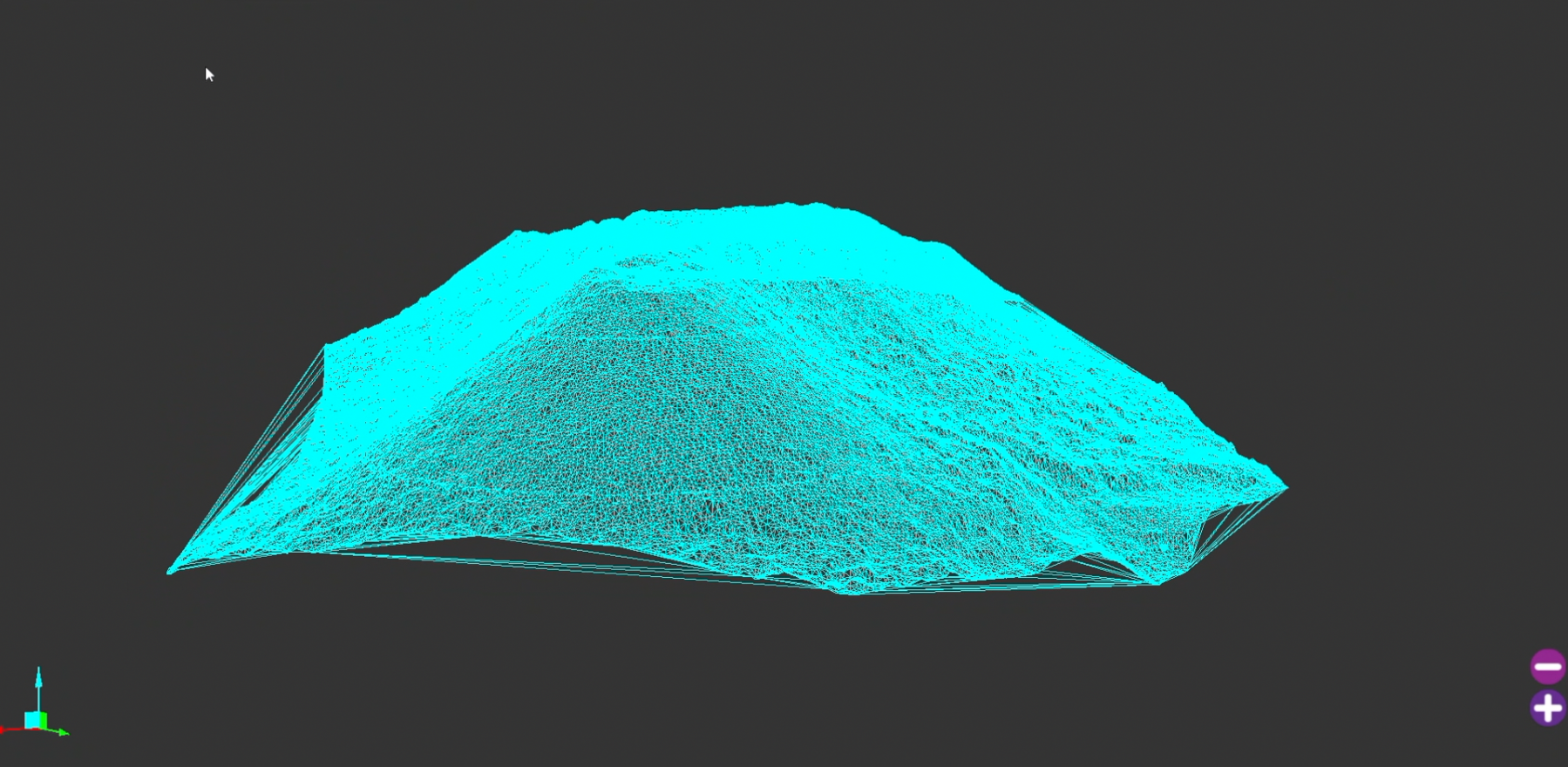
Mesh: Extract meshed digital 3D terrain models (DTM) on bare earth , without vegetation and building.
Volume: Create volume for complex overhang, and vertical surface.
Dimensioning: Measure and annotate angle, distance, area and volume.
Plan intersection highlight: Dynamic viewing of intersecting plans for easy selection.
Vertical: Analyze the verticality of building with color distance interval.
Adaptatif template: Detection of template from cross section, editing by interval, and export into dxf surface.
Dendrometry: Tree trunk automatic detection, Tops, tree trunk, tronk height, crown, DBH ( Diameter and Breast Height), Crown Surface measurements.
Building footprints: Horizontal cross section allows to extract footprints into lines.
Poles and lines: extract poles and powerlines.
Intensity: Extract any lines by point intensity for centerline road , railroad, and parking lots.
Alignment 3D: Extract lines and create 3D Alignment with horizontal curves, vertical curves, and spiral.
VisionLiDAR Features
Features
Point Cloud Extract
Profile and Section
Classification
Mesh
Vectorize
Adaptatif template
Building footprints
Poles and lines
Intensity
Volume
Extract specific parts of the point cloud to classify, delete, or create surface.
Allow dynamic viewing of profile and section of your point cloud into any direction.
Automatic detection of vegetation, building, and bare earth.
Extract meshed digital 3D terrain models (DTM) on bare earth , without vegetation and building.
Vectorize plans created based on your point cloud with points, lineworks, alignment, surface directly into your CAD.
Detection of template from cross section, editing by interval, and export into dxf surface.
Horizontal cross section allows to extract footprints into lines.
Extract poles and powerlines.
Extract any lines by point intensity for centerline road , railroad, and parking lots.
Create volume for complex overhang, and vertical surface.
 Extract specific parts of the point cloud to classify, delete, or create surface.
Extract specific parts of the point cloud to classify, delete, or create surface.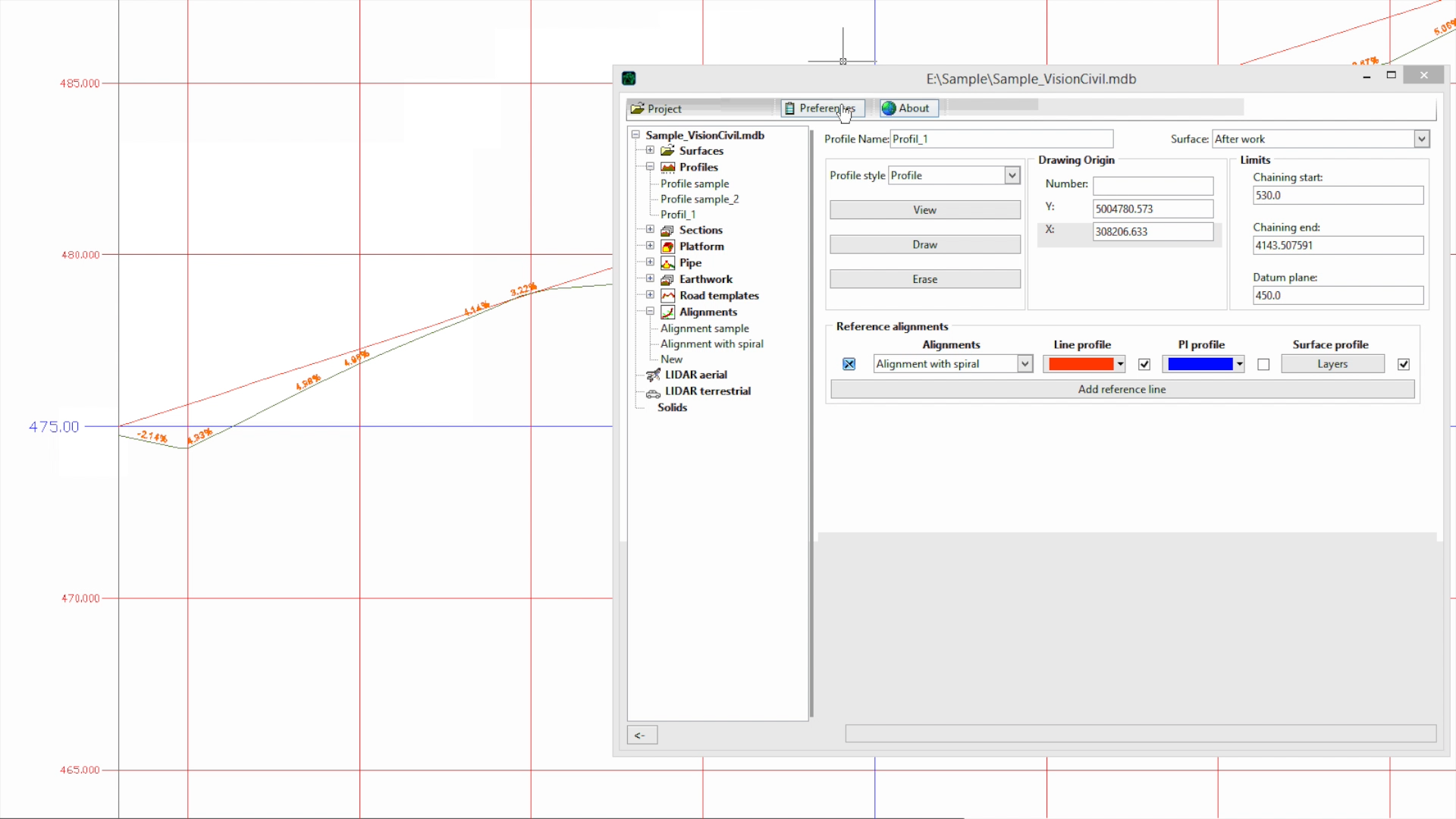 Allow dynamic viewing of profile and section of your point cloud into any direction.
Allow dynamic viewing of profile and section of your point cloud into any direction.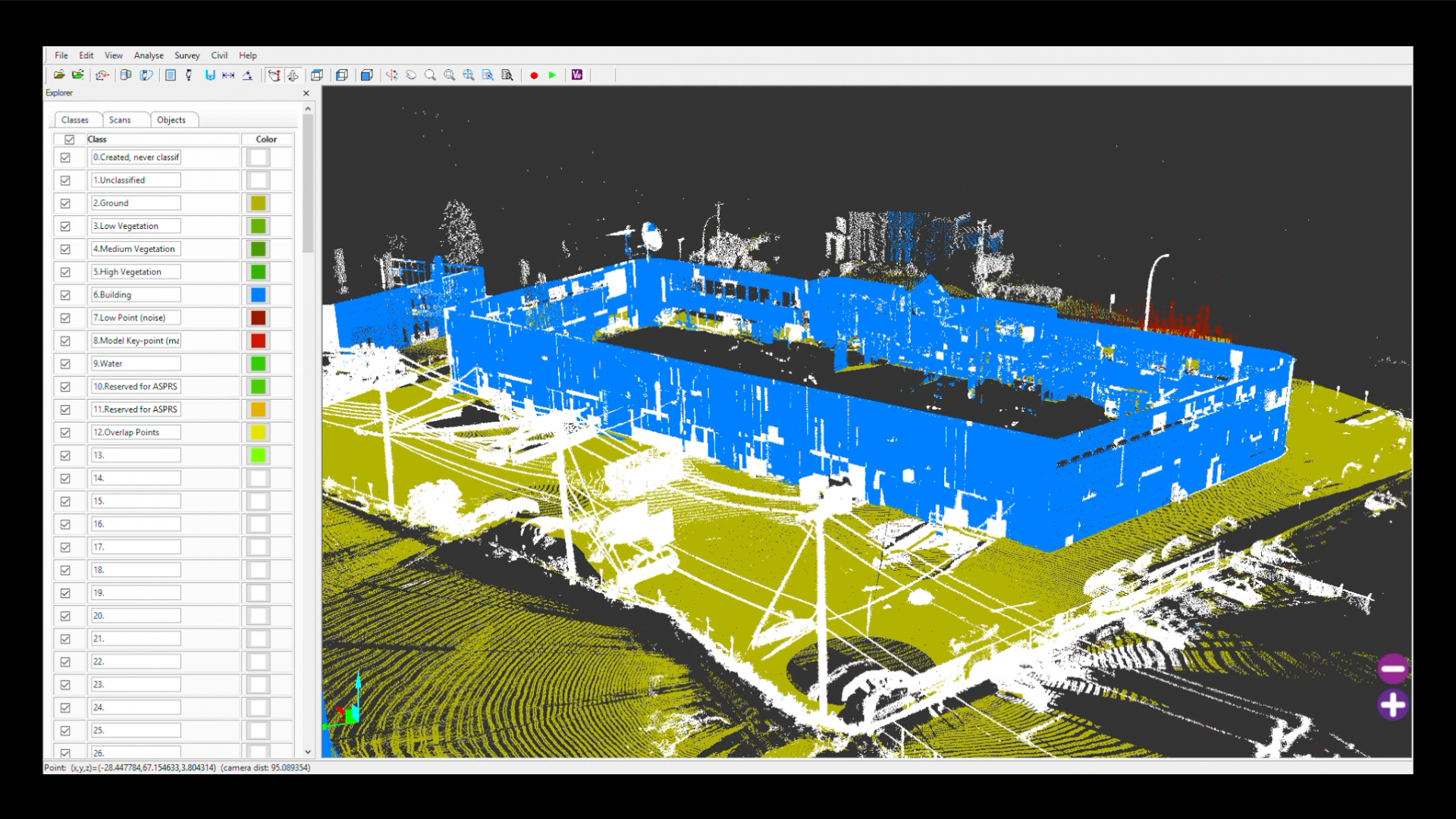 Automatic detection of vegetation, building, and bare earth.
Automatic detection of vegetation, building, and bare earth. Extract meshed digital 3D terrain models (DTM) on bare earth , without vegetation and building.
Extract meshed digital 3D terrain models (DTM) on bare earth , without vegetation and building.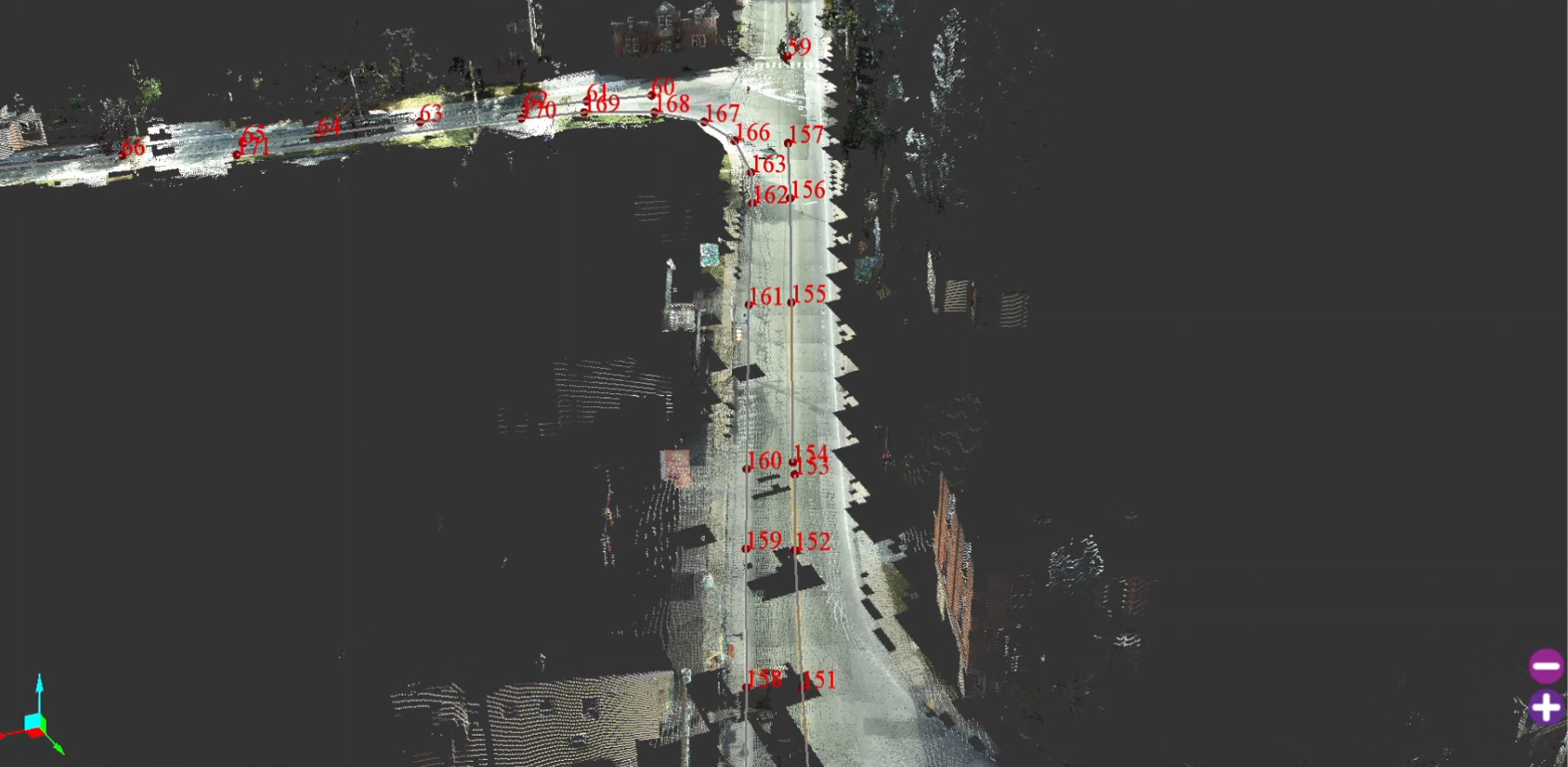 Vectorize plans created based on your point cloud with points, lineworks, alignment, surface directly into your CAD.
Vectorize plans created based on your point cloud with points, lineworks, alignment, surface directly into your CAD.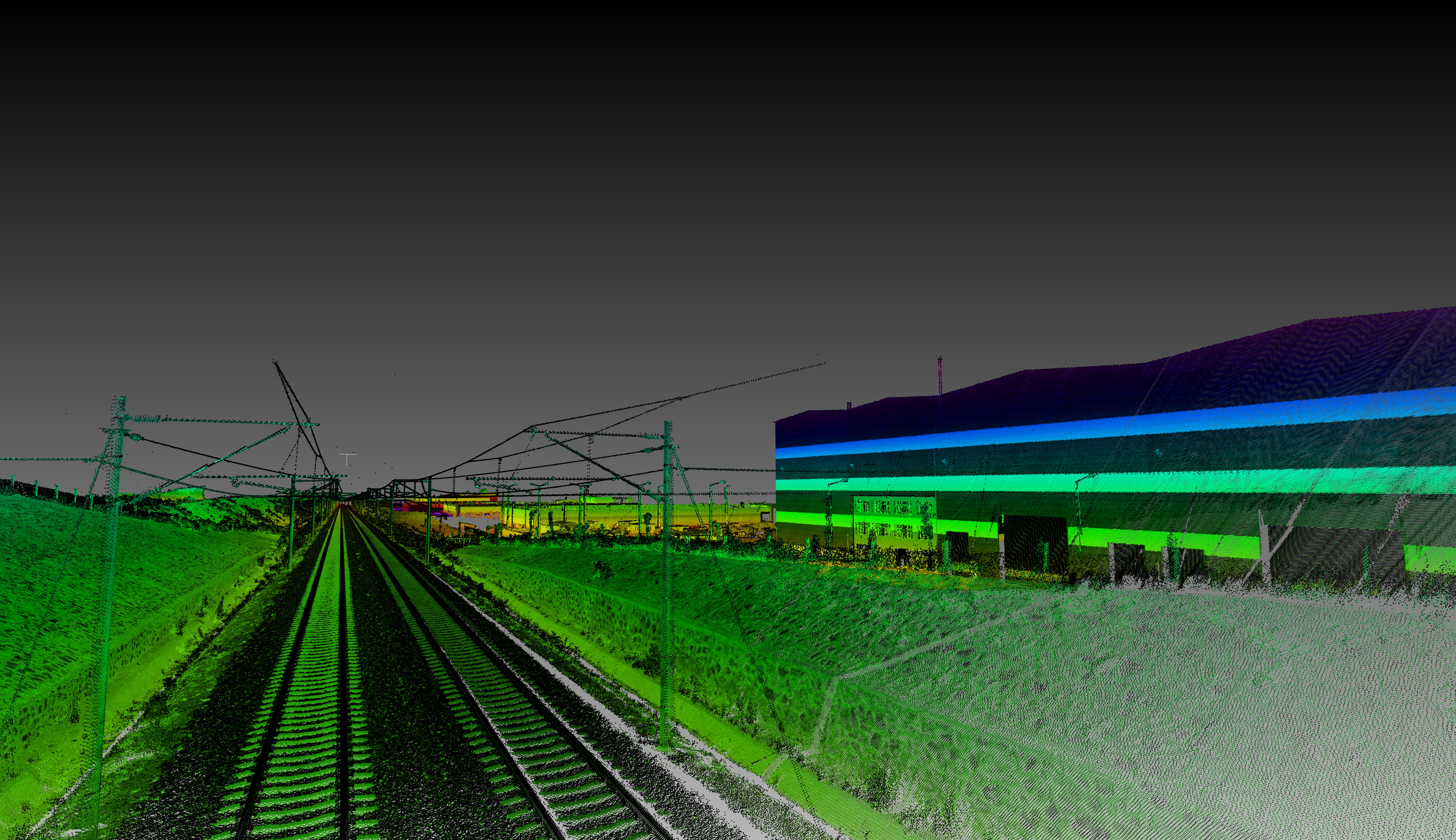 Detection of template from cross section, editing by interval, and export into dxf surface.
Detection of template from cross section, editing by interval, and export into dxf surface.
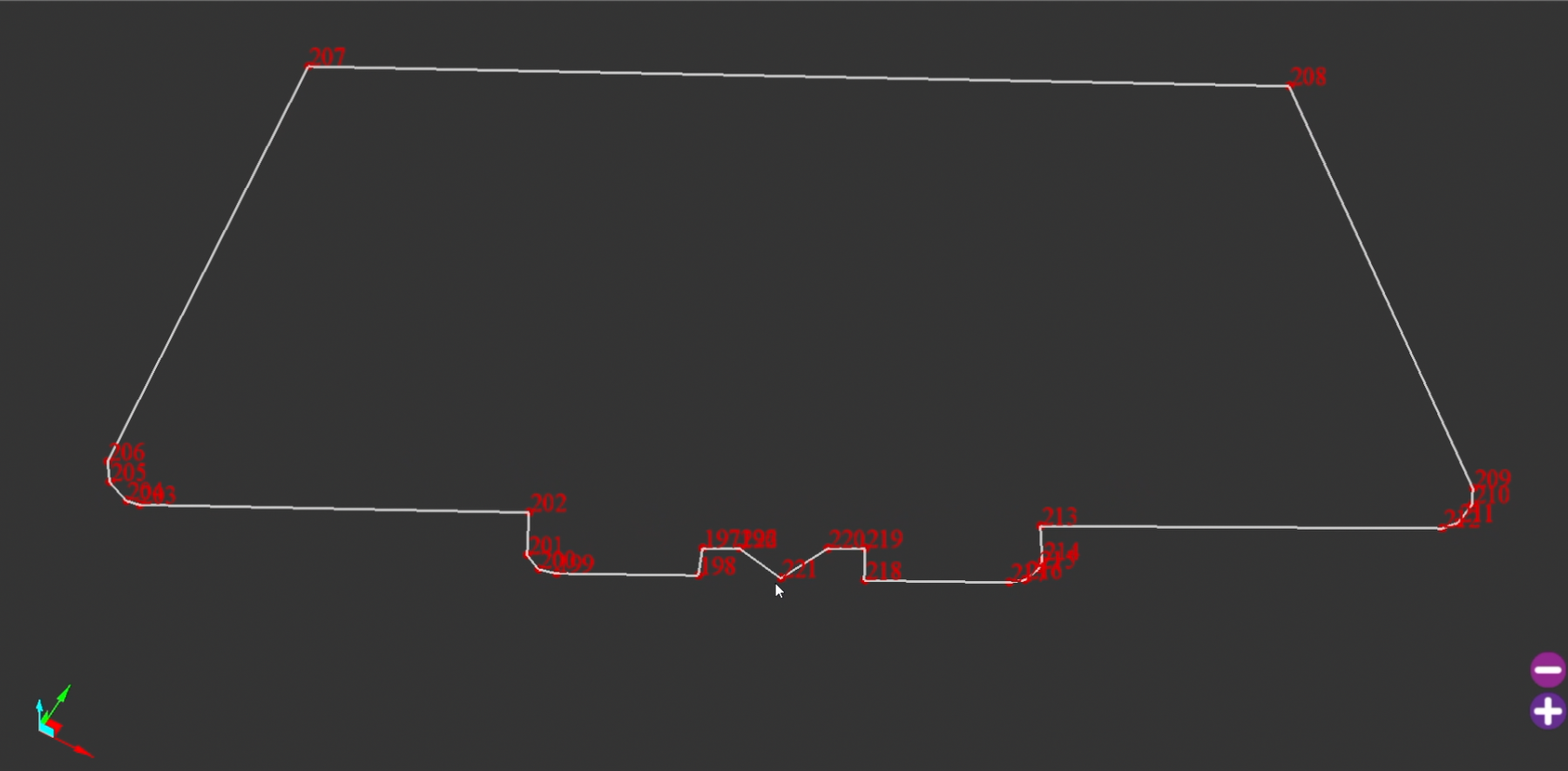 Horizontal cross section allows to extract footprints into lines.
Horizontal cross section allows to extract footprints into lines.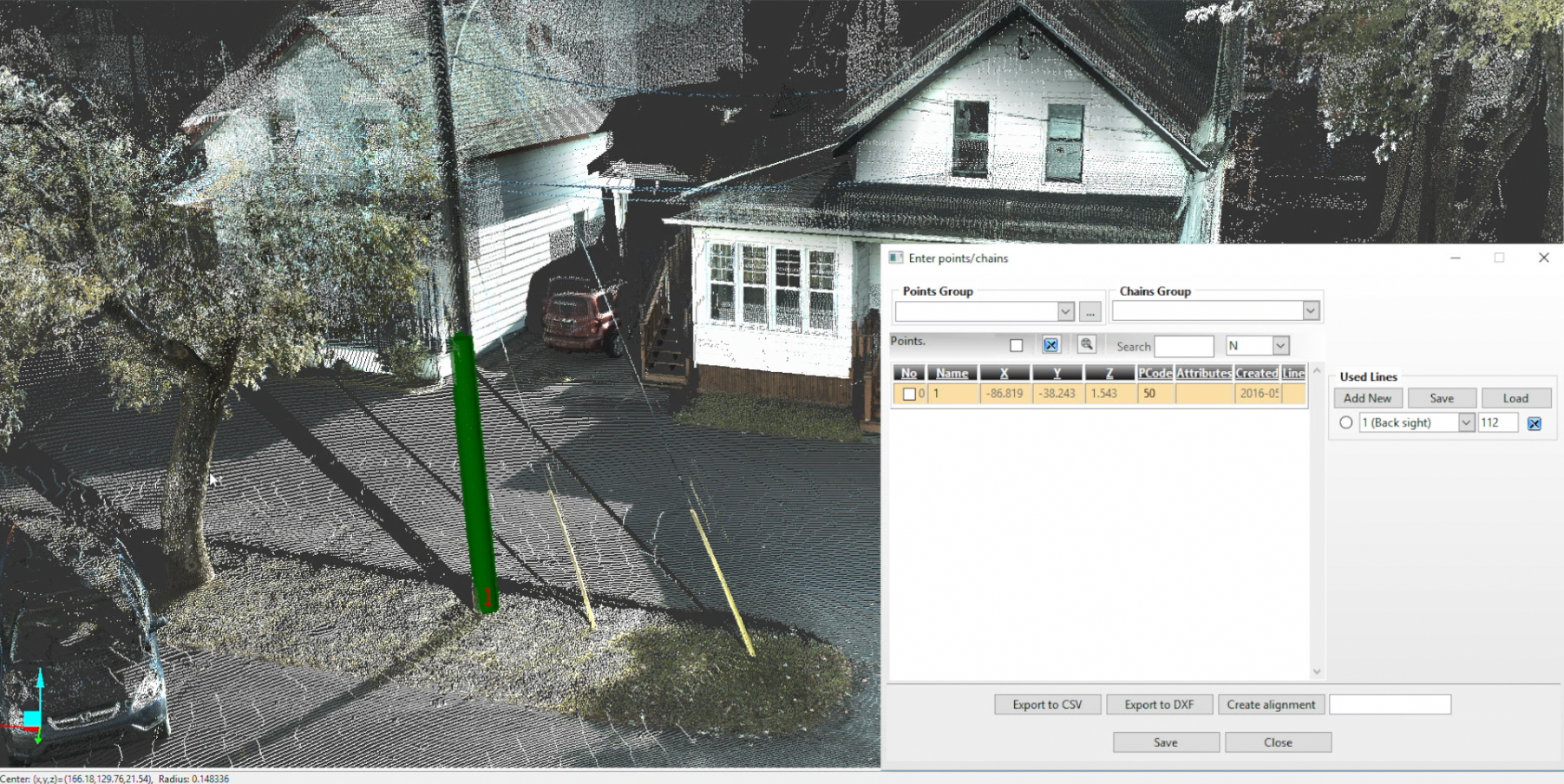 Extract poles and powerlines.
Extract poles and powerlines.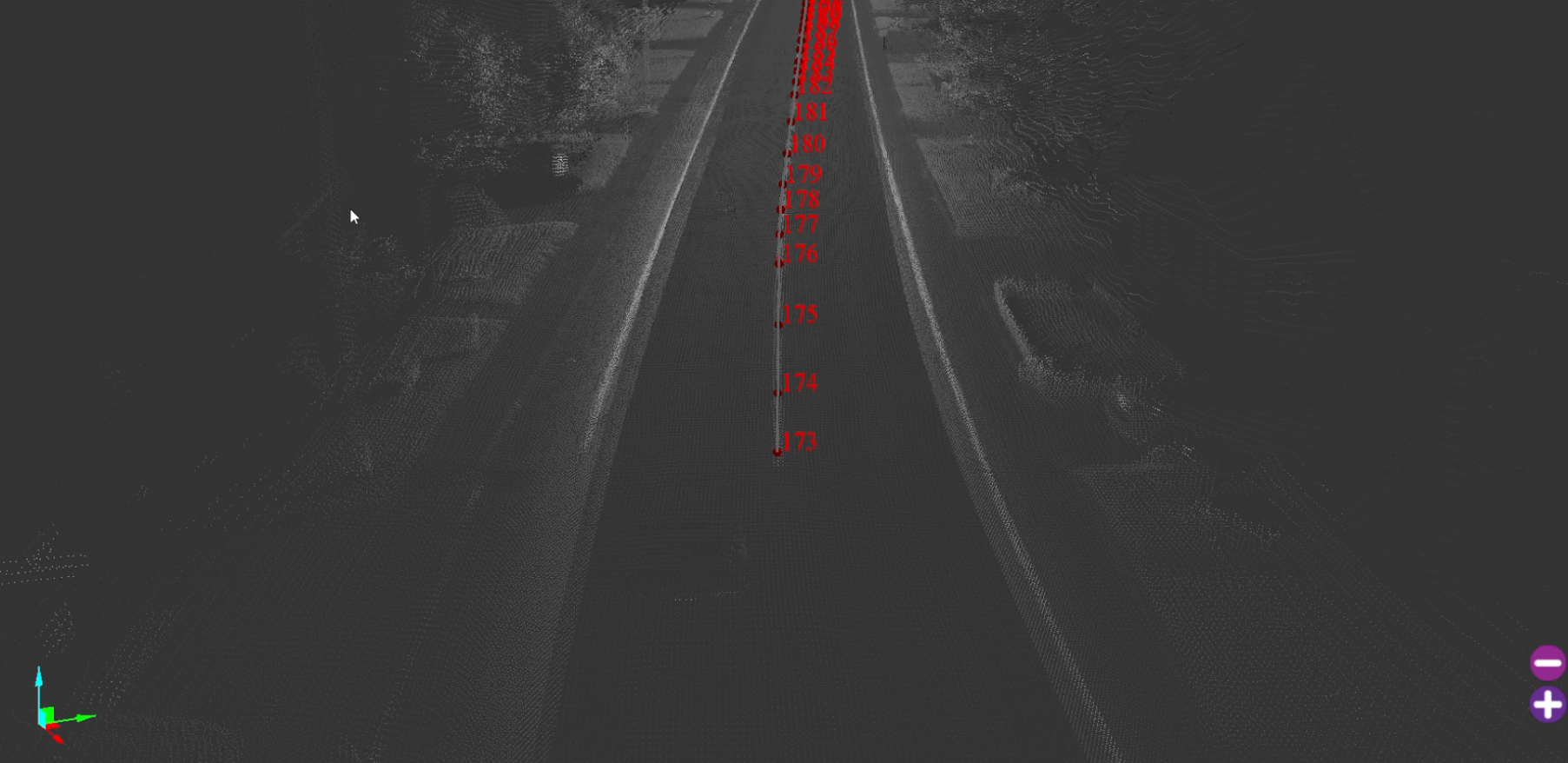 Extract any lines by point intensity for centerline road , railroad, and parking lots.
Extract any lines by point intensity for centerline road , railroad, and parking lots.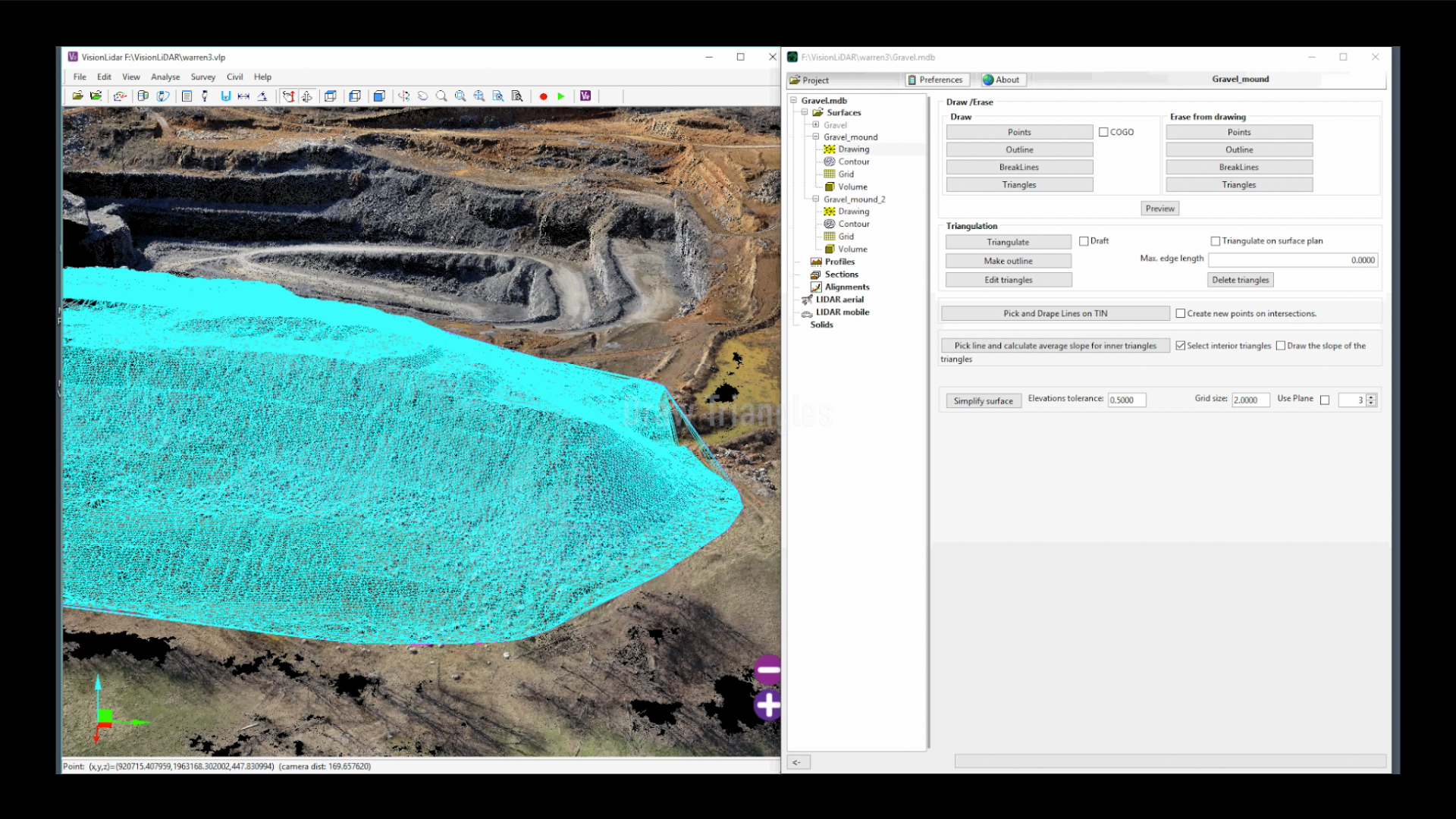
 Create volume for complex overhang, and vertical surface.
Create volume for complex overhang, and vertical surface.